NSP模型通过融合显式物理模型与深度神经网络,构建了一个统一的、端到端可训练框架,在预测精度、泛化性和可解释性之间取得了独特的平衡。
受经典社交力模型启发的动力学系统,将行人运动抽象为受力驱动的过程 关键参数通过数据驱动方式学习,而非手工设定,增强模型适应性 确保物理核心能够嵌入神经网络并参与端到端训练 行人期望以某个舒适速度向其目标方向移动的倾向 行人为了避免与其他行人或障碍物发生碰撞而产生的相互排斥的力 在群体同行时产生的相互吸引的力,保持群体凝聚力
捕捉运动动力学和观测中的复杂不确定性,弥补物理核心在随机性建模方面的不足
校正器补充物理核心无法捕捉的复杂行为模式,如个体意图、情绪和社会习惯等因素
NSP模型基于神经微分方程框架,实现物理与网络的深度融合
[1]
一个嵌入显式物理模型的深度神经网络,物理核心提供确定性的"骨架"轨迹,神经网络校正器添加随机性的"肌肉"和"皮肤"。
端到端的联合训练,同时优化物理模型参数和神经网络权重,确保物理核心和神经网络校正器能够相互适应、协同进化。
"灰箱模型"巧妙地介于纯物理(白箱)与纯数据驱动(黑箱)之间,通过结合物理模型的结构先验和数据驱动模型的学习能力,在物理约束和数据驱动之间寻求最佳平衡。
完全基于第一性原理构建,内部结构完全透明和可解释,但难以精确拟合复杂真实数据。
NSP模型采用的方法,结合物理模型的结构先验和数据驱动模型的学习能力,取长补短。
纯数据驱动的模型,不关心内部物理机制,通过学习统计规律进行预测。
物理定律为模型提供坚实的、可解释的"骨架",使预测结果符合物理常识,提升泛化能力。
深度学习从大规模数据中发现复杂模式,校准和优化物理模型参数,提升预测精度。
NSP模型具有更强的数据拟合能力与噪声处理能力。通过引入深度神经网络作为校正器,能够从数据中学习到复杂的噪声模式和随机行为。
NSP模型具有更好的可解释性、泛化能力与物理合理性。显式的物理核心为模型提供强大的归纳偏置。
在预测精度、泛化性和可解释性这三个关键维度上取得了精妙的平衡,成功缓解了传统机器学习中的权衡问题。
自动驾驶系统在面对发生概率极低但种类繁多的复杂交通状况时,预测存在巨大不确定性,可能导致严重安全风险。
通过嵌入显式的物理约束,提升模型在极端或未知场景下的泛化能力。物理核心提供可靠的"最坏情况"估计基础。
在高密度、未见场景下仍能保持合理的预测轨迹,显著减少碰撞。实验结果强有力证明物理核心在维持预测物理合理性方面的有效性。
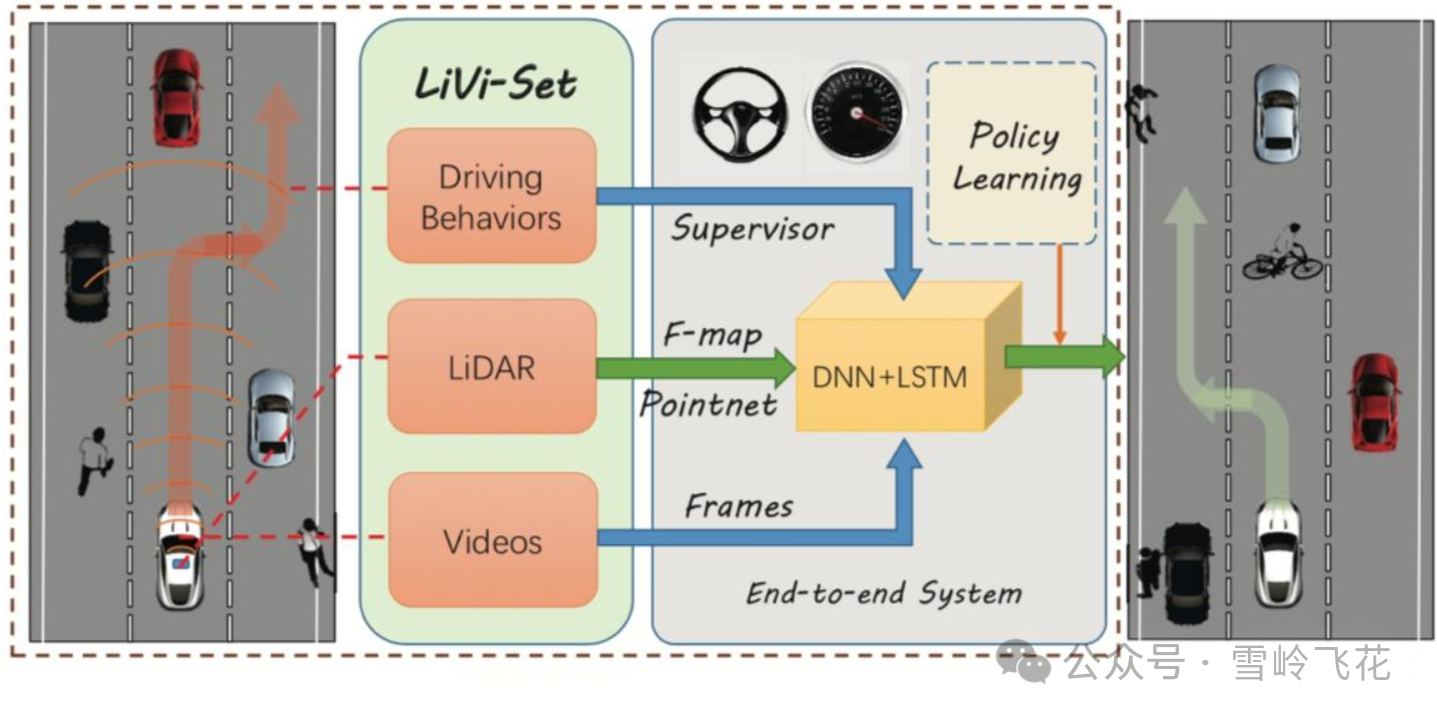
NSP框架在自动驾驶系统中作为"感知-预测-规划"流水线的关键组件,为车辆决策、规划和控制模块提供精准可靠的行人行为预测。
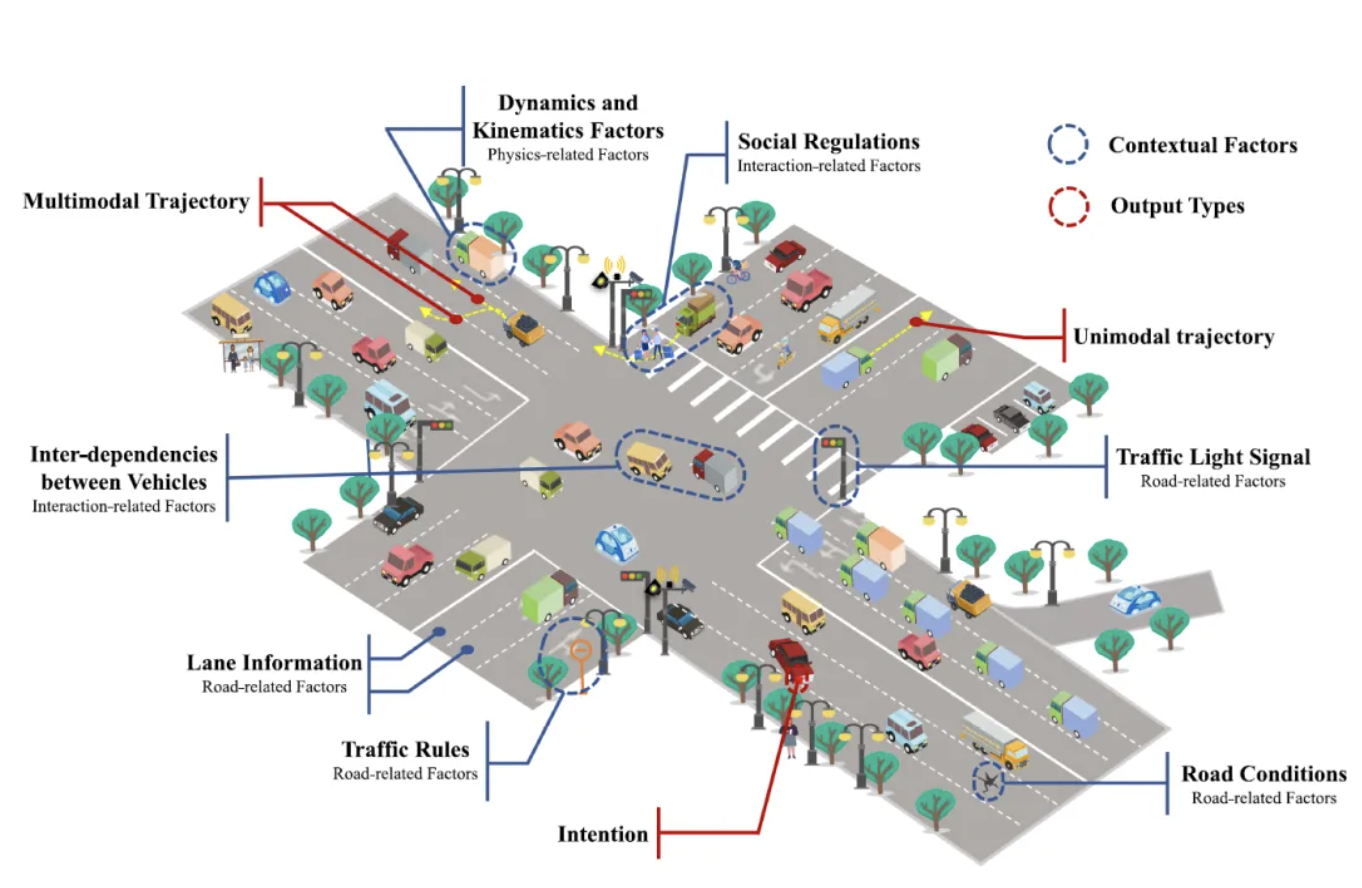
过去3秒,每秒10帧的二维坐标点序列 高精地图数据,道路边界、车道线等 周围车辆、行人、自行车的位置和轨迹 行人朝向、姿态、类别等辅助信息
输出K条(如K=6)最有可能的未来轨迹,每条轨迹都是未来固定时长(如6秒)的坐标点序列,捕捉人类行为的不确定性。
准确判断行人是否有穿越马路的意图,预测其可能的穿越轨迹和时间。
学习复杂的群体行为模式,如跟随、超越、利用车辆间空隙穿行。
学校、医院、商业区等行为模式各不相同,神经网络自适应调整。
通过显式物理模型分析行人运动背后的驱动力,如排斥力、吸引力等作用机制。
利用物理模型的可解释性,诊断和修正预测错误,结构化定位问题根源。
生成符合物理规律的虚拟行人数据,用于训练和测试,特别是危险但罕见的"长尾"场景。
NSP框架可扩展至其他交通参与者(如车辆、自行车)的预测,构建统一的、多智能体的交通场景预测系统。
二自由度或三自由度自行车模型作为物理核心 考虑倾斜和平衡的动力学模型 摩托车、电动车等多样化交通模式
集成更复杂的物理模型以适应不同场景,如认知模型、博弈论模型、多尺度模型等。
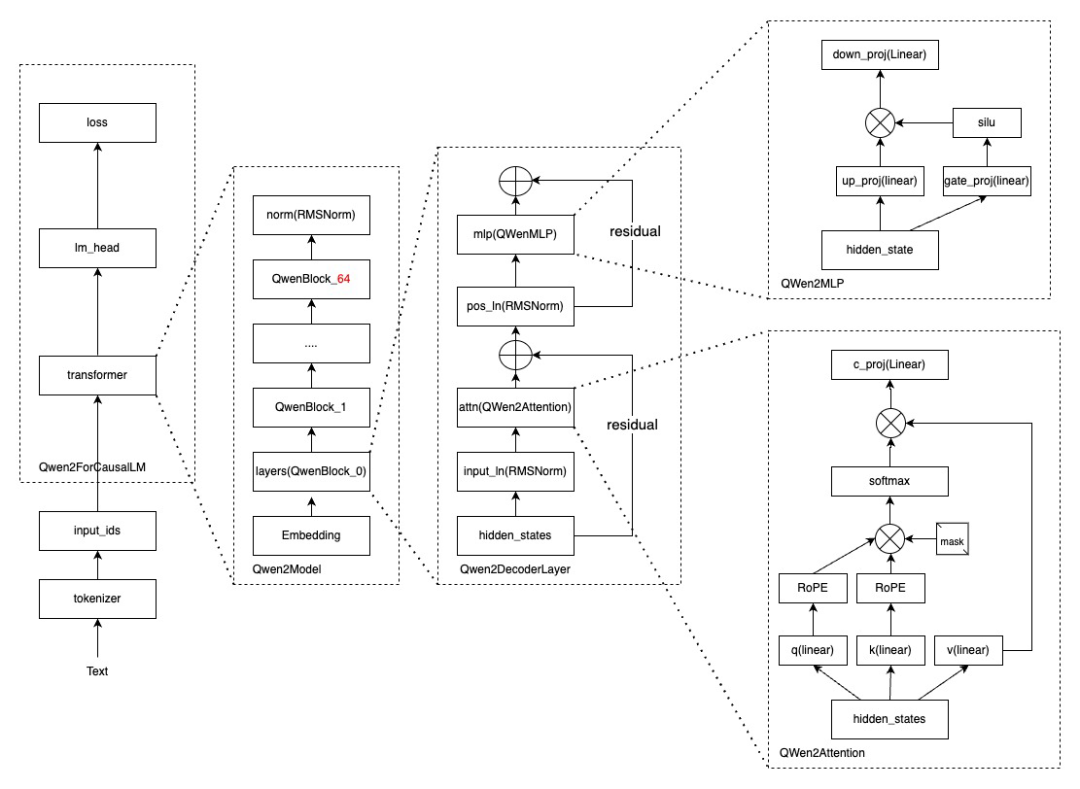
考虑行人的感知、注意力和决策过程 描述交通参与者之间的交互策略 宏观流体力学与微观社会力相结合 论文核心模型解析:Neural Social Physics (NSP)
1.1 模型概述:融合物理与神经网络的混合架构
1.2 可微分物理核心:基于社交力模型的确定性动力学
社交力模型
可学习参数
可微分特性
物理核心组成要素
驱动力 (Driving Force)
排斥力 (Repulsive Force)
吸引力 (Attractive Force)
1.3 神经网络校正器:基于变分自编码器的不确定性建模
功能定位
协同工作
1.4 模型架构与训练方法
神经微分方程框架
整体架构
训练方式
"灰箱模型"范式在自动驾驶中的应用与优势
2.1 核心思想:物理约束与数据驱动的平衡
白箱模型
缺点:对现实简化过多
灰箱模型
优势:平衡精度与泛化
黑箱模型
缺点:缺乏可解释性
设计哲学
物理定律提供可解释性和泛化性
AI提升精度和适应性
2.2 相对于传统模型的优势
对比纯物理模型
物理核心参数通过数据学习,自适应调整内部参数
VAE校正器专门建模物理核心无法解释的残差部分
对比纯数据驱动模型
预测结果可分解为物理核心和神经网络部分
轨迹天然平滑合理,避免"穿墙"等错误
物理定律普适性保证未见过场景的合理预测
综合优势
2.3 解决自动驾驶中的"预测魔咒"问题
"预测魔咒"挑战
长尾场景问题
NSP应对策略
实证结果
自动驾驶场景中的具体实现与潜力
3.1 行人轨迹预测的实现方式
输入数据处理
历史轨迹
静态环境
动态交通
语义信息
多模态输出
场景应用实例
无信号交叉路口
人车混行密集交通
特殊区域适应
3.2 模型的可解释性与分析能力
行为解释
模型调试
仿真应用
3.3 未来潜力与发展方向
框架通用性
机动车辆
自行车
其他参与者
物理模型演进